
[ 原创 ] Python开发进阶之浅析Tars
已经转岗Python开发有一段时间了,对于现在团队的核心产品发布系统Tars的源码也读了一点,始终没有做出很好的总结,想来如今是时候了。这个系列将会介绍几个核心的亮点feature,并由此讲讲关于Python开发的一些个人观点。当然,代码都不是我写的,纯粹是学习大牛之作的笔记总结罢了。
在这第一篇里,鄙人将介绍一下关于Tars发布系统的一些设计和抽象。
需求分析?
据鄙人所知道,发布系统的需求大概是:
- 装配好应用语言SDK及Web Server等;
- 应用的打包和配置;
- 路由或者服务发现策略的变更(一般即更新代码服务的拉入拉出);
- Pull代码并安装(下载包、解压代码、配置等)到server上;
- 健康监测;
- 灰度和必要的容错等.
那么,以Ansible为例,可能据此实现发布系统的思路便是编写一个个的role,然后分别完成上述的需求。那么,仅仅这样就够了吗?我们只需要编写简单的调用Ansible的脚本编排一下任务的调用就能实现发布的需求了?
从某种意义上来说,也许是的,但如果你想将发布系统做的健壮和容错的话(主要原因即应用发布足够复杂),仅仅这样自然是不够的。
比如说,我们想针对xx应用点火时间设置为xx分钟,又或者我们想灵活控制发布时的一些参数,比如调用Ansible(或Saltstack)操作超时的配置等等。如果想要优雅地管控这些需求,那么抽象出来一些组件则显得尤为重要了。
以Tars为例,它的pipeline是这样的:
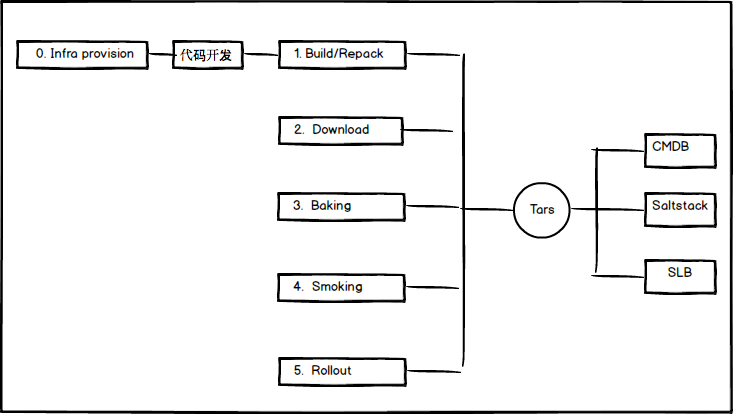
从最初机器的上线装配,到代码开发完毕,再到构建包->下载代码到机器->安装和配置及启动服务->健康监测和冒烟测试->拉入集群,整个流程主要以Tars为核心调度器,涉及与多个组件的交互。
状态机
从上面的pipeline中,我们不难发现,发布一个应用时的操作步骤可能会很多,并且每一个步骤都有可能面临出错的境遇(毕竟外部系统都是不可靠的@~@)。
对于这个问题,Tars给出的解决方案便是“将每个步骤抽象成一个个原子性的task”,然后利用状态机驱使发布过程。这样一来,每个操作都做成是一个状态性的Job(state job),而不是简单的命令操作(从命令式开发到声明\状态式开发本身就已经是大势所趋~),retry以及状态切换等特性的实现都不再是难事了!
django-fsm & celery task chain
那么怎么用Py实现这样的逻辑呢?
首先,关于状态机,Tars选择的是django-fsm这个类库,简单来说,该类库提供了一个transition的decorator,帮助实现django model层面的状态机,该decorator有以下几个参数:
- field:映射的状态字段;
- source:限制的源状态;
- target:将会跳转的目标状态;
- condition:限制条件;
- …(其他参数可以通过上面的链接查看具体的官方文档)
这样的话,Tars便可以根据它的需求,编织出一张状态机切换图,然后依照不同的发布策略,抽象出不同的Mixin并可以灵活的编排起来,比如_BrakeFSMixin、FortFSMixin、TargetFSMixin 、BatchFSMixin等等。
其次,光有状态机对于发布逻辑的状态控制还不够,我们还得有一个具体的执行器,实现对各个外部组件的调用与反馈,然后切换发布状态。针对这一块,Tars选择的是消费Celery的task chain特性,这样便能做到将这些task做成一个连起来的chain,而且celery支持通过信号完成中断等功能,配合状态机即可实现一个完整的task pipeline。限于篇幅,鄙人这里便不再过多讲述细节,tars核心组件预计今年也将开源,欢迎关注。
结语
OK,第一篇文章就暂告一段落了,接下来的文章中,鄙人将就Tars产品的一些py开发技巧和造的一些轮子做一些简单介绍,敬请关注~